FoodPop
FoodPop
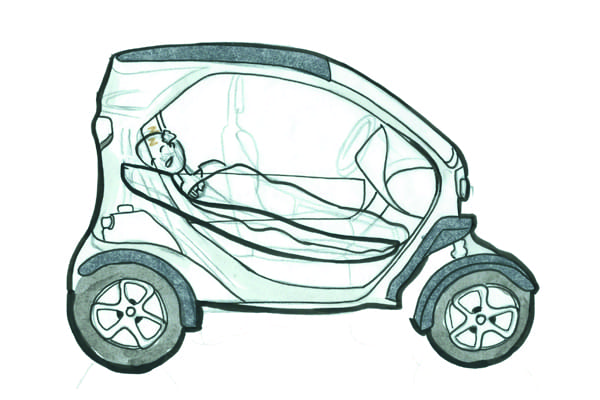
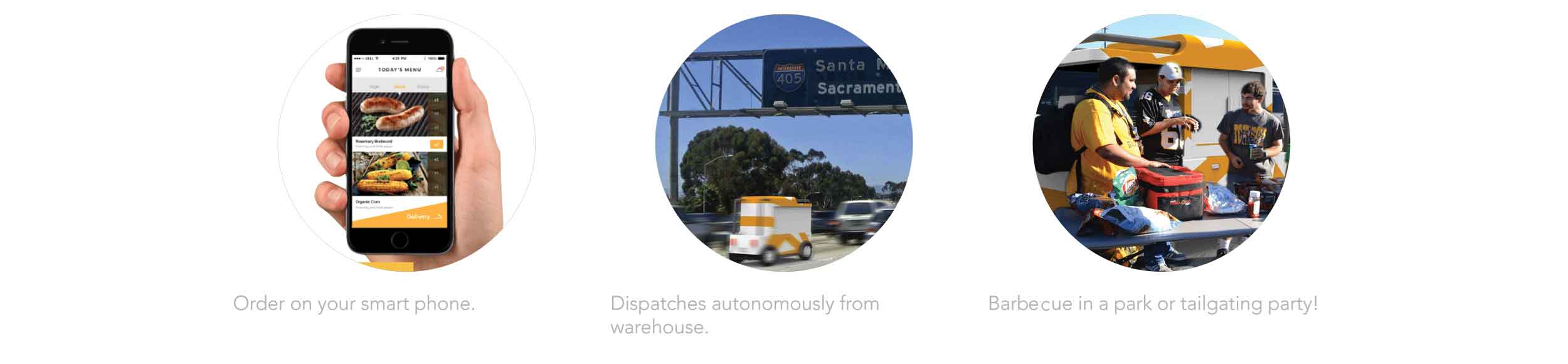
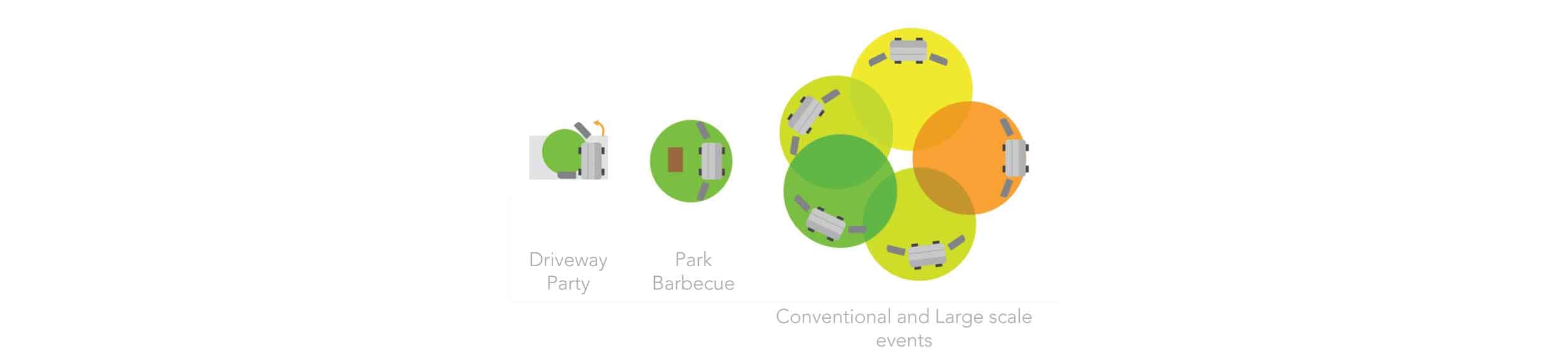
A futuristic concept of an autonomous barbecue delivery car.
Role
Industrial Design
Strategy
Company
Renault
(At California College of the Arts)
Duration
4 months (2016)
Team
Aditi Magal, Judy Leung, William Chan, Isamu Taguchi, Lingfeng Hua
Prompt
Renault sponsored our team to design a futuristic autonomous car concept.
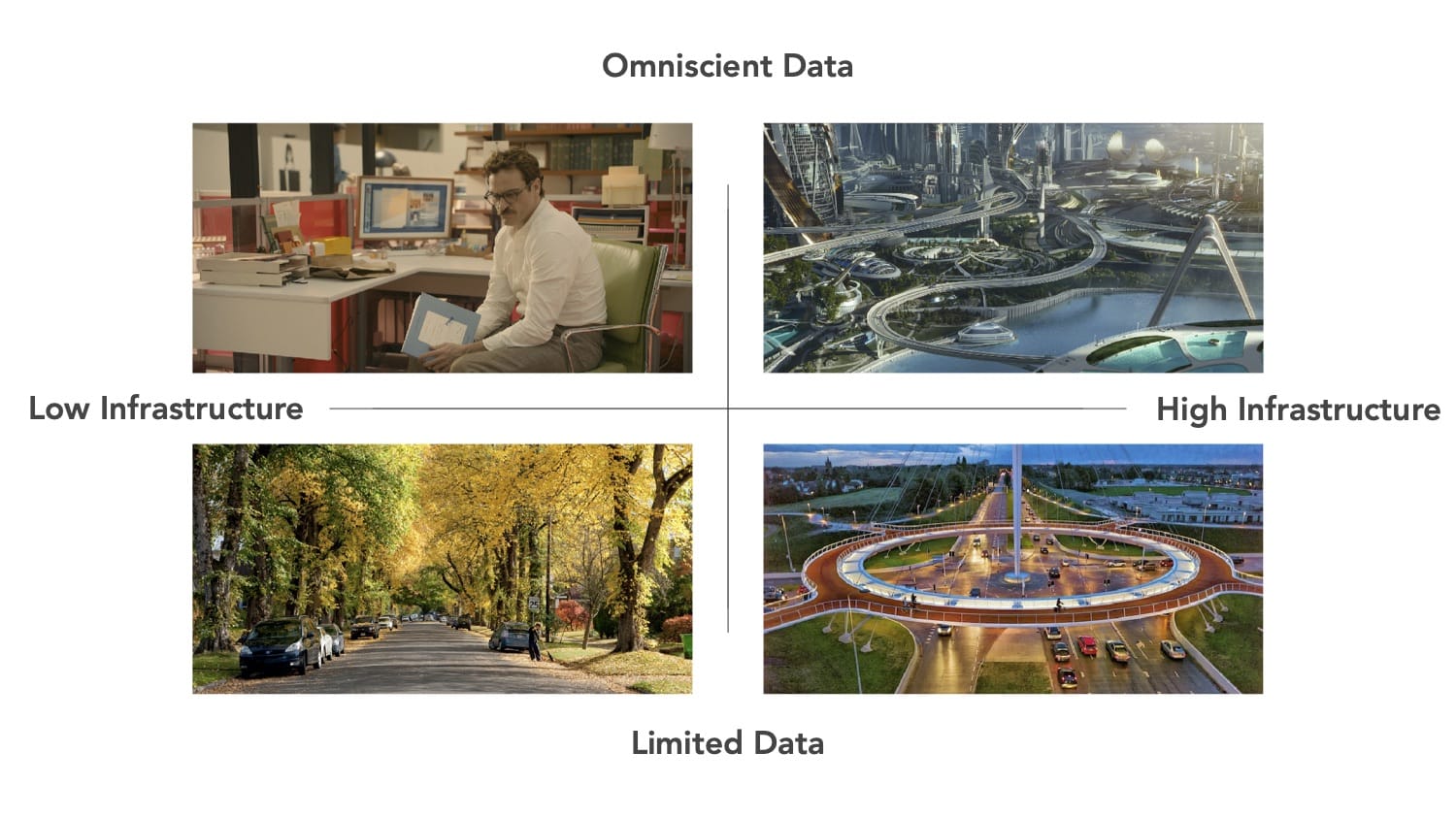
Research
We visited Stanfords Automotive research center and learnt about autonomous cars.
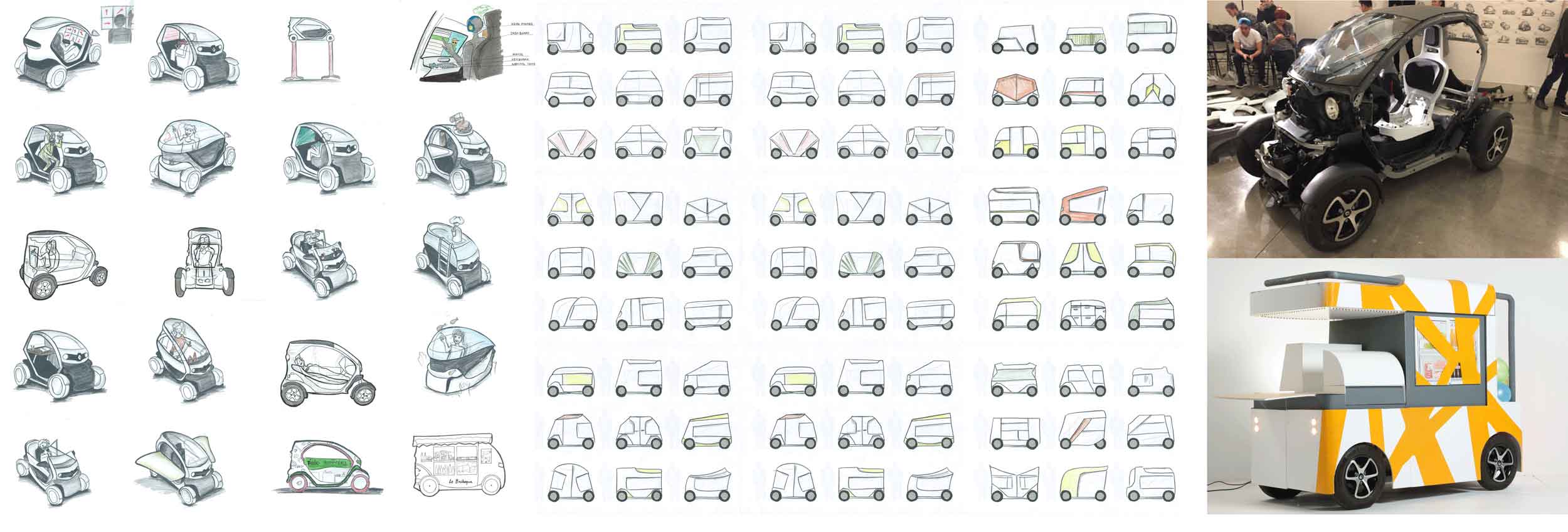
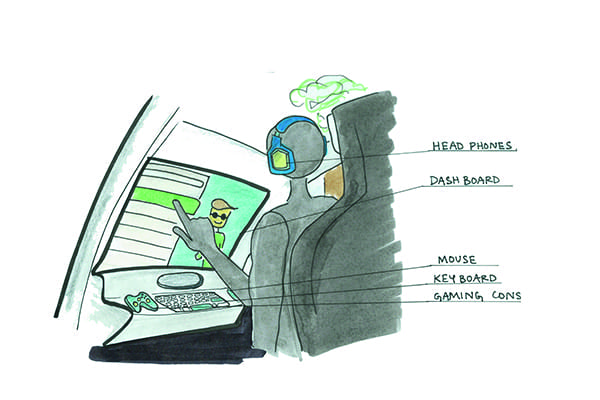
Ideation
We ideated and brainstormed concepts by sketching and creating physical prototypes.
Concept
An autonomous car that can go anywhere to deliver barbecues as a service.
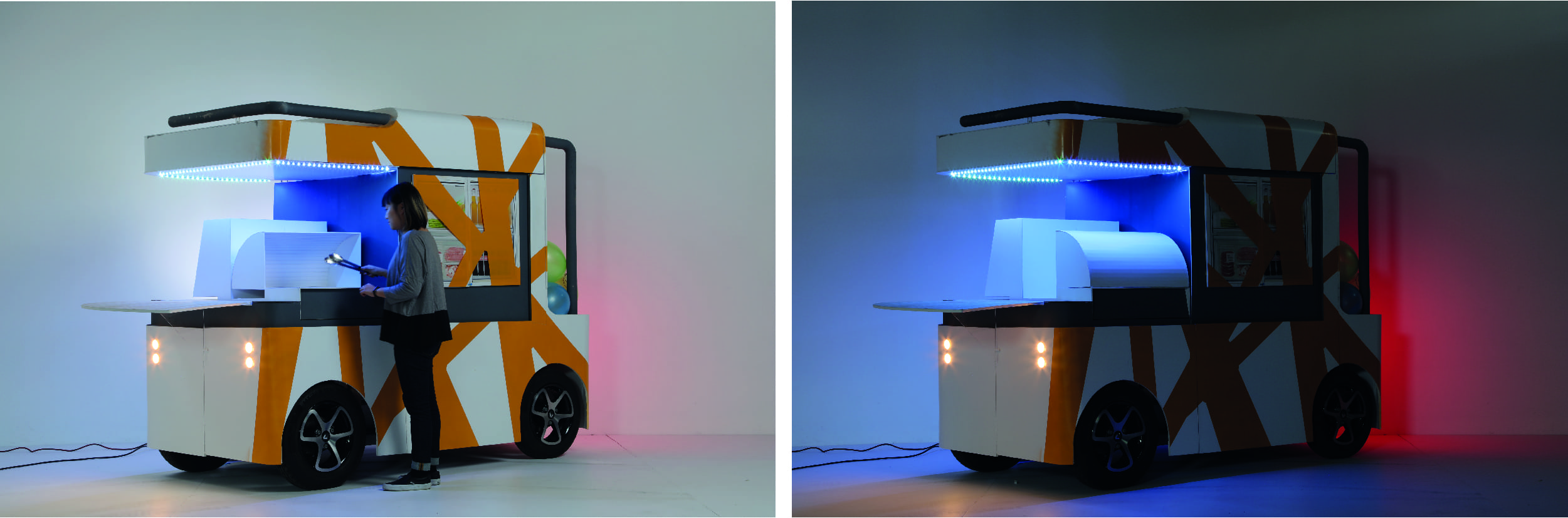
Final Prototype
A full scale mockup of the concept made out of wood, foam, paint, etc.
Outcomes
We presented our concept to executives at Nissan Research Center in Silicon Valley.